 Home - Products - Download - Mission - Free Tools - Index - Contact - News |
Two Finger Gripper: | ||||
|
This two finger griper is from a series of simple tools for collaborative robots that have been made available under an Open Source Hardware license.
The tools are designed by 4TECH Robotics ApS and based on 3D-printed parts. This and other tools for robots are published as a free design. More free tools from 4TECH Robotics ApS |
 |
|||
Scope: | ||||
 |
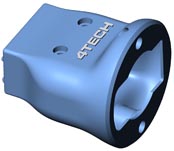
Classic two finger pneumatic unit is often used as a gripper for small robots. By mounting this gripper in 3D-printed housing sharp edges, pneumatic connectors and wires can be covered. The tool will then be safe to use on collaborative robots. Used together with the Kelvin Tool Changer this tool will form a small gentle unit with no visible pneumatic lines or wiring. |

|
||
Parts for the tool: | ||||
 |
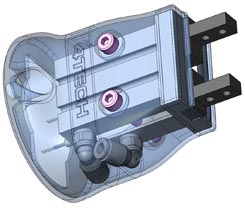
The gripper is built over a standard two finger gripper unit (SMC: MHZ2-12D) and a 3D-printed housing. The pneumatic fittings for the SMC unit must be a Legris fitting (Legris: 3199 04 19). This fitting have a very low building height. |
 |
||
Video: | ||||
|
|
||||
CAD-files: | ||||
 |
Download the CAD-files for the Two Finger Gripper here This housing is designed for the Kelvin Tool Changer tool plate. It can be mounted directly on a robot arm but then you must add an opening for the pneumatic lines in the housing. |

Download CAD-files. |
||
Web Shop: | ||||
| You can buy the 3D-printed part for the Two Finger Gripper from 4TECH Robotics webshop at Shapeways This is only the 3D-printed plastic parts for the tool. You have to supply the other parts and to assemble the tool your self. Feel free to contact for more information on the free tools. |
 Shapeways |
|||
First User: | ||||
 |
DanRobotics A/S is using a long version of this 3D-printed two finger gripper. Here is a video with the gripper and the Kelvin Tool Changer on an ABB robot in the Dan Robotic bin-picker. |
 |
||
| Last update: 9/11 2020 | Cookie Free | Follow us on LinkedIN | © 2020 Copyright by 4TECH Robotics ApS. All Rights Reserved |